Hilberîna pîşesaziyê girêdanek girîng e ji bo pêşvebirina pêşkeftina aborî û civakî. Niha, lêkolîn li ser alavên weldingê yên otomatîk kûrtir dibe û beton tê çêkirin, ev yek dihêle ku ew di hilberîna cûrbecûr celebên avahiyên weldingê de bi berfirehî were bikar anîn.
Di pêvajoya kaynakirina otomatîk de, kontrolkirina maqûl a aqilmend û dîjîtal a xeletiya valahiya civîna kaynakirinê heya radeyekê, li ser vê bingehê, di heman demê de cûdahiya pozîsyona perçeyê kar, xwarbûna movika kar û faktorên din jî divê werin hesibandin. Ji ber vê yekê, teknolojiya şopandina dirûtina kaynakirina lazer di pêvajoya kaynakirinê de rolek girîng dilîze.
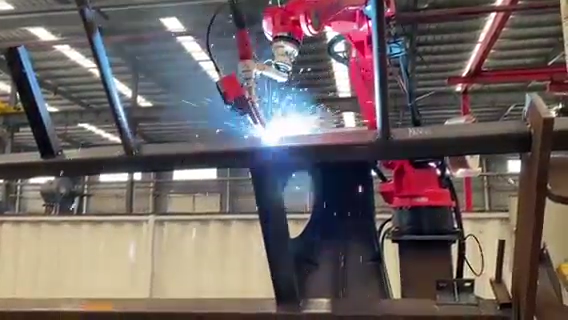
Qeydakirina bingeha otomobîlan a tanka çîmentoyê Bi qeydakirina lazerê, zivirîna heft eksenî ya orbita erdê ya heşt eksenî
-Cihê perçeya kar pir diguhere
-Di girêdana parçeya kar de devîasyon heye
rastbûna welding -High pêwîst e
-Jîngeha xirab a welding û dûman
Di vê rewşê de, robota jîr Yooheart HY1006A-145 ji bo kaynakirinê bi pergala şopandina dirûtina kaynakirinê ya lazer tê bikar anîn, ku xwedan nermbûn, aramî û pêbaweriyek bilind e.
Berî her kaynakirinê, alav pêşî koordînata dirûna kaynakirinê bi rêya cihê dirûna kaynakirinê dişopîne û tomar dike, û dûv re ji hêla algorîtmaya navxweyî veqetîna koordînatê hesab dike û parametreyên koordînatên referansê dixe nav dema rastîn da ku guherîna rastîn di demê de rast bike, da ku piştî kaynakirinê mohrkirin û yekparebûna hilberê were misoger kirin.
Rêbaza "hevberdana çar xalan"
Wekî ku ji her kesî re tê zanîn, du xal xêzek rast diyar dikin, lê civata kar dê goşeyê çêbike, algorîtmaya kevneşopî nikare pozîsyona wê diyar bike, ev yek hewce dike ku rêbaza "xaçerêkirinê" di saet çaran de were bikar anîn, du xêzên ku hev dibirin xala xaçerêkirinê hildiberîne, algorîtmaya taybetî bi rêya destnîşankirina koordînatên çar xalên naskirî pozîsyona koordînata xala xaçerêkirinê hesab dike, da ku bigihîje armanca weldingê.

Sîstema şopandina dirûtina lazerê
Sîstema şopandina dirûtina lazerê ya kaynakirinê bi giranî ji sensorên lazer û termînalên çavdêriyê pêk tê. Sensorê lazerê ji bo bidestxistina çalak û pêvajoya rast-dem a agahdariya dirûtina kaynakirinê tê bikar anîn, û têkiliya rast-dem bi robotên pîşesaziyê re diparêze. Termînala çavdêriyê sensoran dişopîne û mîheng dike. Sîstem her weha fonksiyonên dîtin, şopandin û skankirinê berî kaynakirinê hene da ku hewcedariyên kaynakirina jîr bicîh bîne.
Prensipên xebatê: Skenkirina dirûna weldê, guncawkirina wêneyên ewrê xalan, algorîtma xalên taybetmendiyê bi awayekî rast destnîşan dike, û daneyên rast-dem ên encamên hesabkirinê ji robotê re têne şandin, vediguherînin talîmatên kontrolê, operasyona robotê diguherînin an jî rêber dikin.
Çareseriya plakaya pêçayî

Çareseriya weldingê ya pêveka otomatîkî ya qulika dor

Çareseriya derziya dorhêl

Çareseriyên lûleya lûleyê
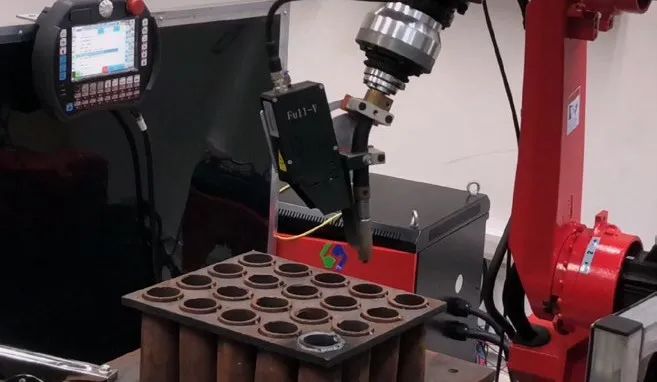
Yunhua Intelligent dikare çareseriyên otomasyonê yên ewle û bibandor û çareseriyên pergalê yên rast-dem peyda bike. Sîstema şopandina dirûtina kaynakê ya dîtina lazerê dihêle ku robota kaynakê cih û şopandina dirûtina kaynakê di rast-dem de pêk bîne, û rêça kaynakê li gorî cihêbûna dirûtina kaynakê di pêvajoya kaynakê de rast bike, da ku kaynakirina aqilmend a rastîn pêk bîne.
Dema weşandinê: Nîsan-09-2022



