
Stasyona Kar a Welding Robotîk a 8 Eksenî bi Du Pozîsyoneran



Stasyona Kar a Qeymaqê ya Robotîk bi Du Pozîsyoneran

Pêşgotina Berhemê
Meriv çawa dikare karîgeriya xebata robotê zêde bike? Zêdekirina maseyeke din a xebatê dê rêbazeke bi bandor be. Karker dê perçeya xebatê li ser maseyeke xebatê hilbijêre dema ku robot dê li ser maseya din a xebatê biqelîne da ku robot bikaribe perçeya xebatê bi berdewamî biqelîne.
PARAMETRA BERHEMÊ & HÛRGILIYÊN
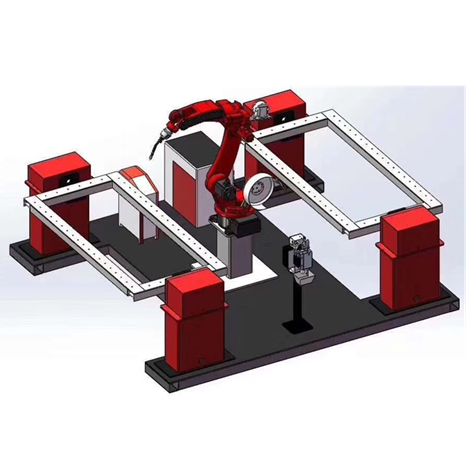
Stasyona me ya kar a robotîk a 8 eksenî ya kaynakirinê bi du pozîsyoneran yek ji stasyonên kar ên standard e. Eksena derveyî ya zêde dikare bi robotê re hevaheng be, da ku robot bikaribe hin serîlêdanên tevlihev biqedîne. Van her du pozîsyoneran jî dikarin wekî maseya xebatê werin binavkirin û dikarin bi qutiya kontrola ji dûr ve werin kontrol kirin. Dema ku karker karê tamîrkirinê qedand û qutiya kontrola ji dûr ve bikirtîne. Robot dê piştî kaynakirina ya berê biçe ser vê maseya kaynakirinê. Em dikarin stasyona paqijkirina meşaleyê girêdin ku ji bo meşaleya kaynakirinê kêrhatî ye.
Bikaranînî

WÊNE 1
Pêşkêş
Îstasyona xebatê ya robotê ya 8 Axis
WÊNE 2
Pêşkêş
Robot bi pozîsyonerê du eksenî


WÊNE 1
Pêşkêş
Performansa weldingê ya bi pîvana masiyan
TESLÎMAT Û ŞANDIN
Şîrketa YOO HEART dikare şertên radestkirinê yên cûda pêşkêşî xerîdaran bike. Xerîdar dikarin li gorî pêşîniya lezgîniyê rêya şandinê bi deryayî an jî bi hewayî hilbijêrin. Qutîyên pakkirinê yên robotên YOO HEART dikarin hewcedariyên barkirina deryayî û hewayî bicîh bînin. Em ê hemî pelan wekî PL, sertîfîkaya eslê xwe, fatûre û pelên din amade bikin. Karkerek heye ku karê wî yê sereke ew e ku piştrast bike ku her robot dikare di 20 rojên xebatê de bê pirsgirêk bigihîje bendera xerîdar.



Xizmeta piştî firotanê
Divê her xerîdar berî kirîna robotê YOO HEART baş nas bike. Dema ku xerîdar robotek YOO HEART hebe, karkerê wan dê 3-5 rojan perwerdehiya belaş li kargeha YOO HEART bistîne. Komek wechat an komek whatsapp dê hebe, teknîsyenên me yên ku berpirsiyarê karûbarê piştî firotanê, elektrîkê, hardware, nermalavê û hwd. ne, dê tê de bin. Ger pirsgirêkek du caran çêbibe, teknîsyenê me dê biçe pargîdaniya xerîdar da ku pirsgirêkê çareser bike.
FQA
Q1. Cûdahiya pozîsyonerê ku ji hêla plc û ji hêla pergala kontrolê ve tê kontrol kirin çi ye.
A. Pirsgirêka herî mezin ev e ku heke pozîsyoner ji hêla PLC ve were kontrol kirin, ew tenê dikare ji pozîsyona yek berbi pozîsyona din ve biçe, robot nikare bi pozîsyoner re hevkariyê bike (sînerjî). Dema ku pergala kontrolê bikar tîne, ew dikare bi pozîsyoner re hevkariyê bike. Bê guman, ew xwedî zehmetiyên teknolojîk ên cûda ne.
P2. Meriv çawa tabloya tamîrkirina otomatîkî girêdide?
A. Niha, me 22 têketin û 22 derketin hene. Hûn tenê hewce ne ku sînyalan bidin valva elektromagnetîk.
P3. Ma li stasyona we ya xebatê stasyoneke paqijkirina meşaleyê heye?
A. Li stasyona xebatê me stasyoneke paqijkirina meşaleyê heye. Ev tiştekî îxtîyarî ye.
P4. Meriv çawa stasyona paqijkirina meşaleyê girêdide û çawa wê bikar tîne?
A. Hûn ê rêbernameyek ji bo stasyona paqijkirina meşaleyê bistînin. Û hûn tenê hewce ne ku sînyalan bidin stasyona paqijkirina meşaleyê û ew ê bixebite.
P5. Qereqola paqijkirina meşaleyê çi celeb sînyalan hewce dike?
A. Herî kêm 4 sînyalên ku nîşan didin ku stasyona paqijkirina meşaleyê pêwîst e hene: sînyalên têlên birrînê, sînyala spreya rûnê, sînyala paqijkirinê, û sînyalên bicihkirinê.



